Este tutorial fue creado con el propósito de que conozcas el uso de la librería "mbit" para el movimiento de un robot armado a partir del kit building starter.
Como primer paso deberemos crear un proyecto en el software de makecode bien sea en linea mediante el navegador o el software previamente descargado en sus equipos de computo. Como paso a seguir agregaremos el siguiente enlace en la categoría de extensiones: https://github.com/lzty634158/yahboom_mbit_en con este enlace instalaremos la extensión y con ella nos traerán las siguientes categorías:
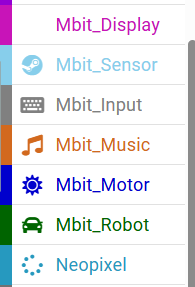
Estas categoría aparecen una vez se instala la librería.
Vamos a explorar la categoría denominada Mbit_robot, allí podremos encontrar funcionalidades que nos permitirán controlar los motores de nuestro prototipo robótico, recuerden que previamente ya deben de tener armado un robot de todos los diseños que nos brinda el kit.
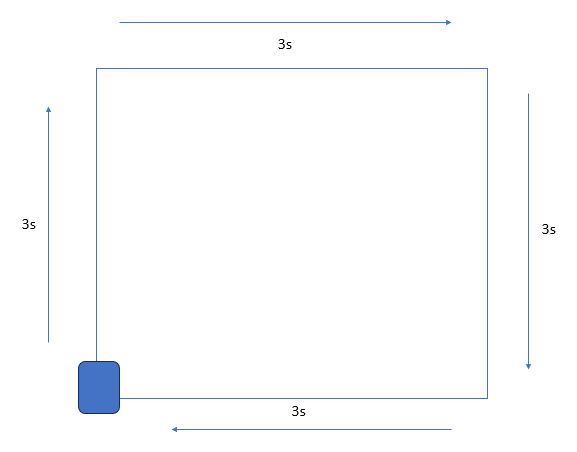
Lo que haremos será básicamente crear un programa donde el robot realice el recorrido de un cuadrado, cada movimiento o lado se representara en tiempo es decir que el robot deberá avanzar durante 3 segundo luego deberá girar a la derecha avanzar nuevamente durante 3 segundos y repetir dicho proceso de manera que termine en el punto que inicio.
Código:
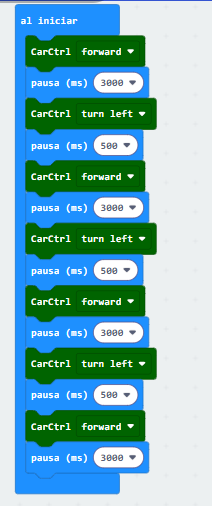
El siguiente bloque contiene las funciones de movimiento del robot:
CarCtrl: forward (avanzar)
CarCtrl: forward (retroceder)

CarCtrl: turn left (Gire a la izquierda)
CarCtrl: turn right (Gire a la derecha)

CarCtrl: turn right (Gire a la derecha)

Ahora lo que haremos será que el robot haga el mismo recorrido repitiéndolo tres (3) veces.
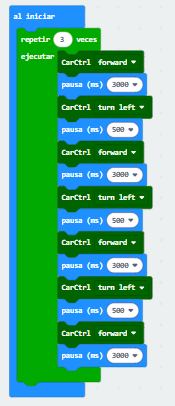
Lo que hacemos es colocar el código inicial dentro de un bucle "repetir" y le indicamos el valor o el número de repeticiones en este caso son 3 veces.