


Seguidor de Línea Básico con mBot2
1. Materiales necesarios
- Robot mBot2 (Makeblock, con el cerebro CyberPi).
- Sensor de seguimiento de línea (ya integrado en el mBot2 - Sensor Quad RGB).
- Cable USB o conexión Bluetooth/WiFi para programar.
- mBlock 5 instalado (disponible en https://mblock.makeblock.com).
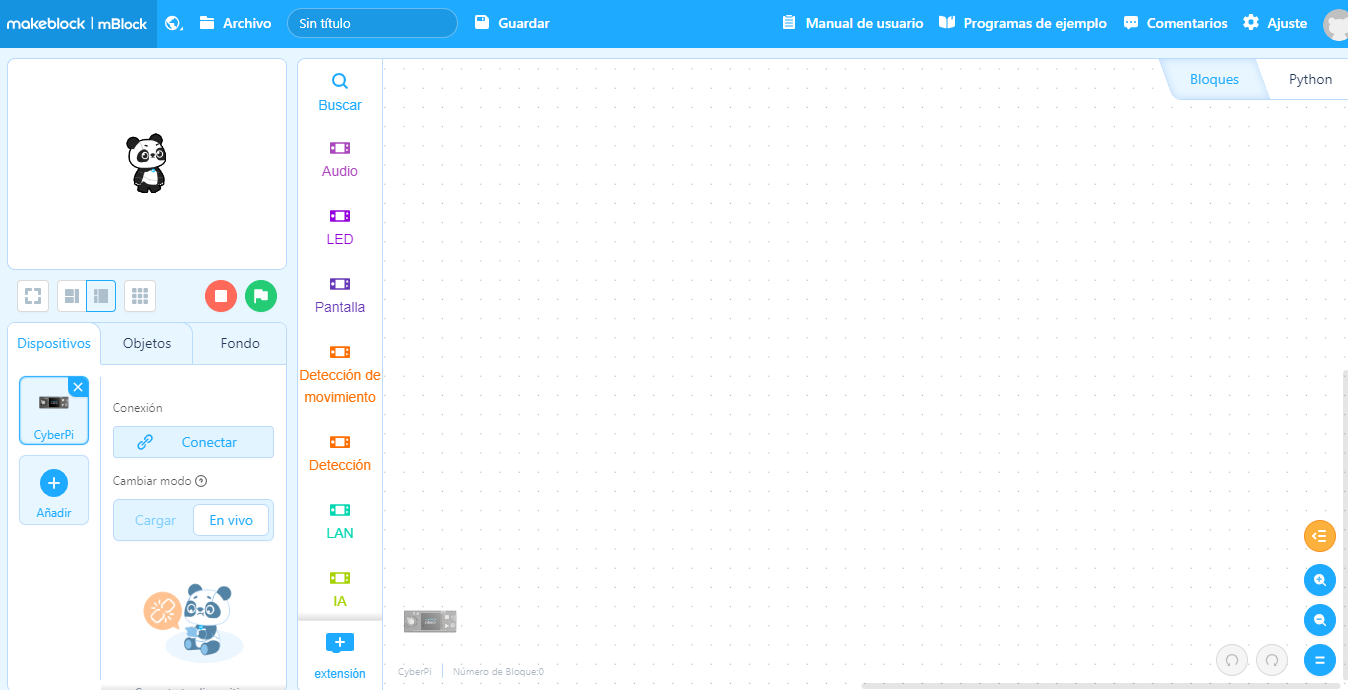
2. Preparar el entorno
- Abre mBlock 5.
- En la parte superior, selecciona el modo "Dispositivo".
- Añade el dispositivo mBot2 (clic en “+” > busca “mBot2” > “Conectar”).
- Conecta el robot por USB y presiona “Conectar”.
- Espera hasta que aparezca el ícono verde indicando conexión exitosa.
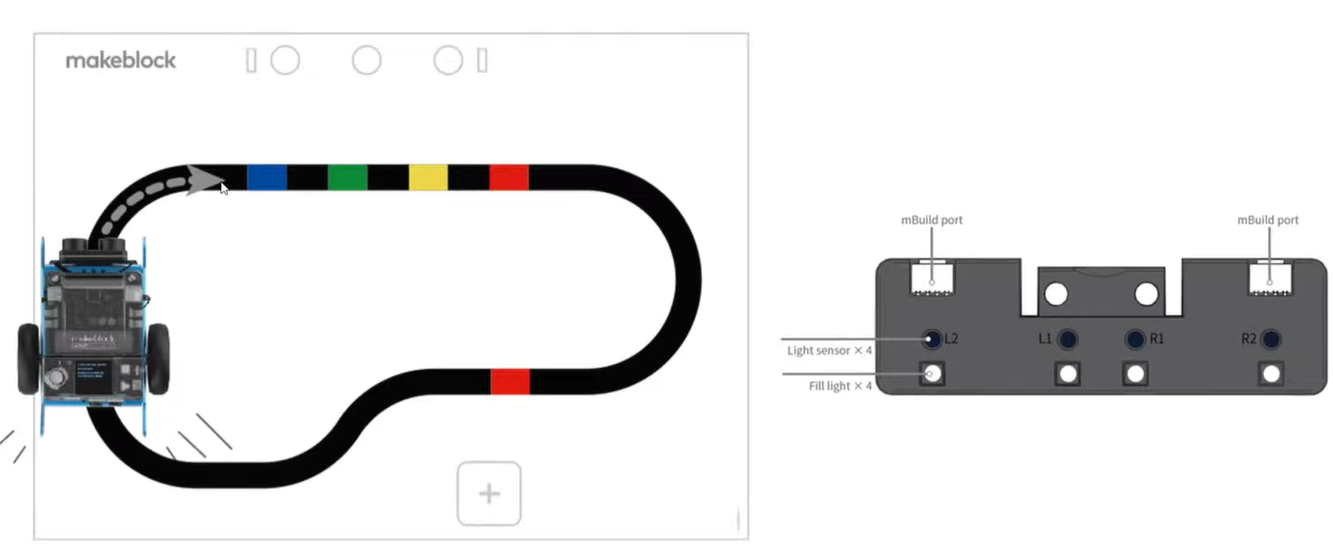
3. Entender el sensor de línea
El sensor de seguimiento de línea del mBot2 tiene 4 detectores:
- L1, L2, R1, R2 (de izquierda a derecha).
- Devuelven valores según el color que detectan:
- Negro → valor bajo (1)
- Blanco → valor alto (0)
Por lo tanto, si el robot está sobre una línea negra en un fondo blanco:
- Los sensores centrales (L1 y R1) leerán 1 (negro).
- Los laterales (L2 y R2) leerán 0 (blanco).
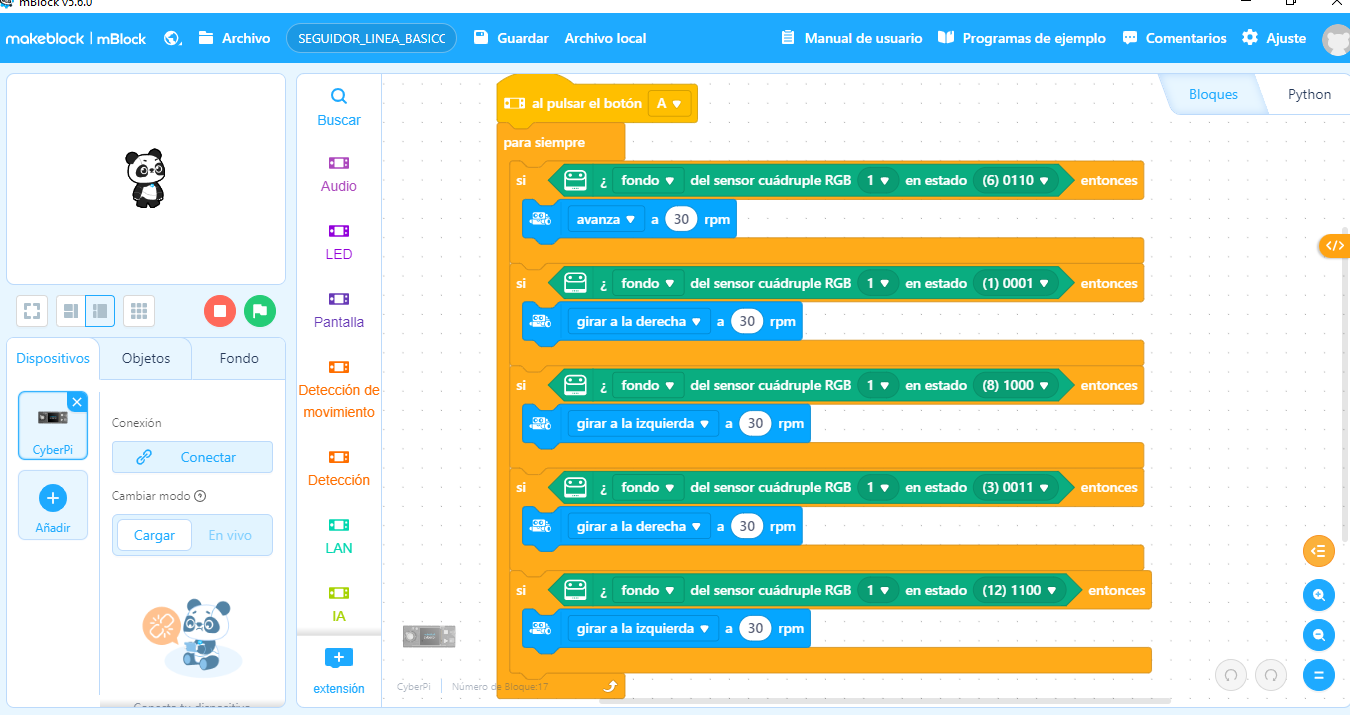
4. Lógica básica del programa
Queremos que el robot:
- Avance cuando esté centrado sobre la línea.
- Gire a la izquierda si la línea se va a la izquierda.
- Gire a la derecha si la línea se va a la derecha.
Código fuente:
7. Prueba y calibración
- Coloca el mBot2 sobre una pista negra sobre fondo blanco (en forma de circuito).
- Presiona el botón A del robot mbot2.
- Si el robot se sale:
- Ajusta los valores de velocidad.
- Revisa que los sensores estén a unos 2–5 mm del suelo.
- Comprueba que los sensores leen bien (puedes mostrar los valores en pantalla de CyberPi para depurar).
Pública tu duda o comentario
Resuelve tus dudas con la comunidad.
(0) Comentarios
No registra comentarios, se el primero en comentar.
Publicar