


Práctica pinza con servomotores SG90
En esta practica diseñaremos y construiremos una simulación de pinza con servomotores, controlada mediante el envió y recepción de datos desde el monitor serial.
Materiales requeridos:
- Arduino Uno - Nano.
- Protoboard
- Cables de conexión - Jumpers
- Tres (3) servomotores - SG90
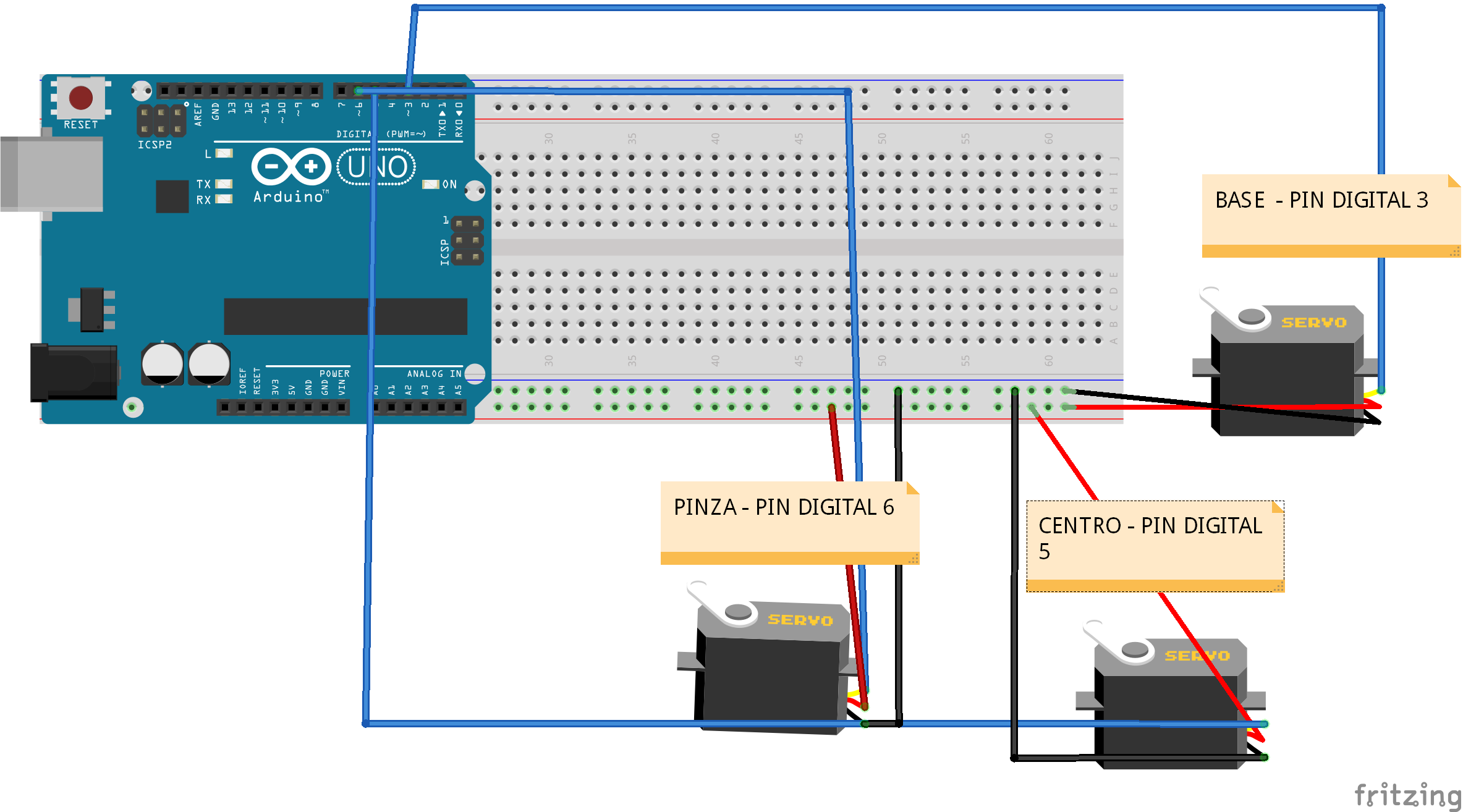
En esta práctica se busca realizar la simulación de un brazo diseñado con 3 servomotres, donde los denominaremos BASE, CENTRO y PINZA.
El servomotor BASE lo conectaremos al pin digital del PWM Arduino Uno 3.
El servomotor CENTRO lo conectaremos al pin digital del PWM Arduino Uno 5.
El servomotor PINZAlo conectaremos al pin digital del PWM Arduino Uno 6.
Tal como se observa en la siguiente Imagen:
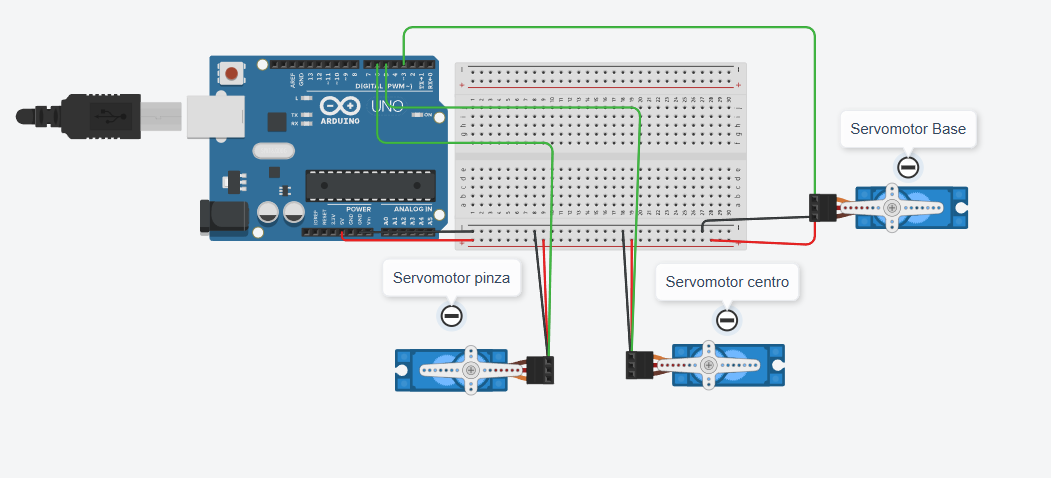
Para controlar nuestros servomotores lo haremos a través del monitor serial enviando caracteres específicos, para activar el servomotor de BASE - enviaremos desde el monitor serial la letra ‘b’, para activar el servomotor CENTRO - enviaremos desde el monitor serial la letra ‘c’ y por ultimo para activar el servomotor PINZA - enviaremos la letra ‘p’.
Código de ejemplo:
#include <Servo.h>
int base=3;
int centro=5;
int pinza=6;
Servo sbase, scentro, spinza;
char dato = ' ';
void setup()
{
Serial.begin(9600);
sbase.attach(base);
scentro.attach(centro);
spinza.attach(pinza);
sbase.write(90);
scentro.write(90);
spinza.write(90);
delay(3000);
}
void loop()
{
if(Serial.available()>0){
dato = Serial.read();
if(dato == 'b'){
sbase.write(0);
delay(2000);
sbase.write(180);
delay(2000);
}
if(dato == 'c'){
scentro.write(0);
delay(2000);
scentro.write(180);
delay(2000);
}
if(dato == 'p'){
spinza.write(0);
delay(2000);
spinza.write(180);
delay(2000);
}
}
}Pública tu duda o comentario
Resuelve tus dudas con la comunidad.
(0) Comentarios
No registra comentarios, se el primero en comentar.
Publicar